Contents
Support Managers
|
Xartashah
English
| online |
|
Aerielle Kiyori
English
| offline |
|
Alexander Pixels
English
| offline |
|
Amyalka
English
| offline |
|
Chardaedae16
English
| offline |
|
Glaznah Gassner
English, Russian
| offline |
|
Justina Mcminnar
English
| offline |
|
Makaylah Wurgle
English
| offline |
|
Rehnaeaislinn
English
| offline |
|
Sammyredfire
English
| offline |
|
shorty McKeenan
English
| offline |
| show offline managers | |
| English, Russian |
Waypoint Touching Prims
Waypoint Touching Prims
Automatic bot is often need to touch something in-world: a prim or attachment. (Attachments are also prims indeed. We separate in-world prims and attachments for easier reading).
Touching in-world prims
In-world prims can be touched by using their UUID:
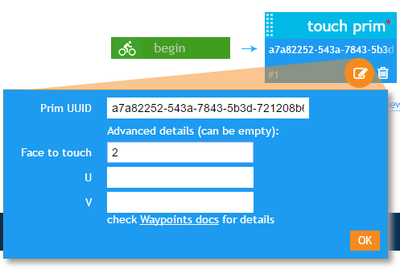
- Simple prims require UUID only.
- Complex prims (like elevator buttons) may need more touch details: face U and V. To get these details (face, U and V), use our LSL helper script.
Touching bot attachments and HUDs
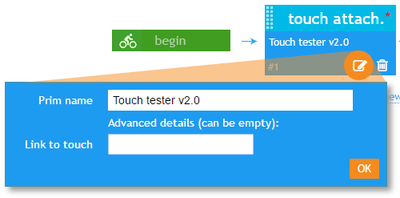
Touching attachments and HUDs is a bit different because these object change their UUID on every bot login.
Thus, you should use the object name to make a touch:
If your HUD has multiple buttons, determine the link number. Use Firestorm or a similar viewer, edit object and get the link number:
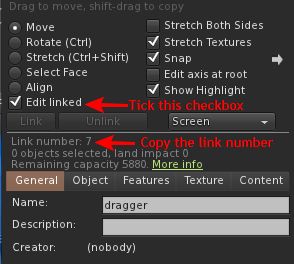
- The link number of the root prim is always "1".
- Single-prim objects are also have link number = 1
IMPORTANT: Data availability
Please note that bot loads all nearby prims within 10-20 seconds after startup. Thus, bot may need more time to issue this command.